
TITA
轮足机器人
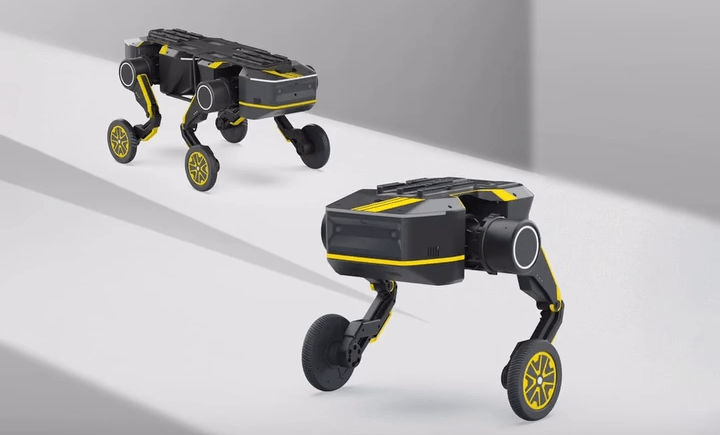
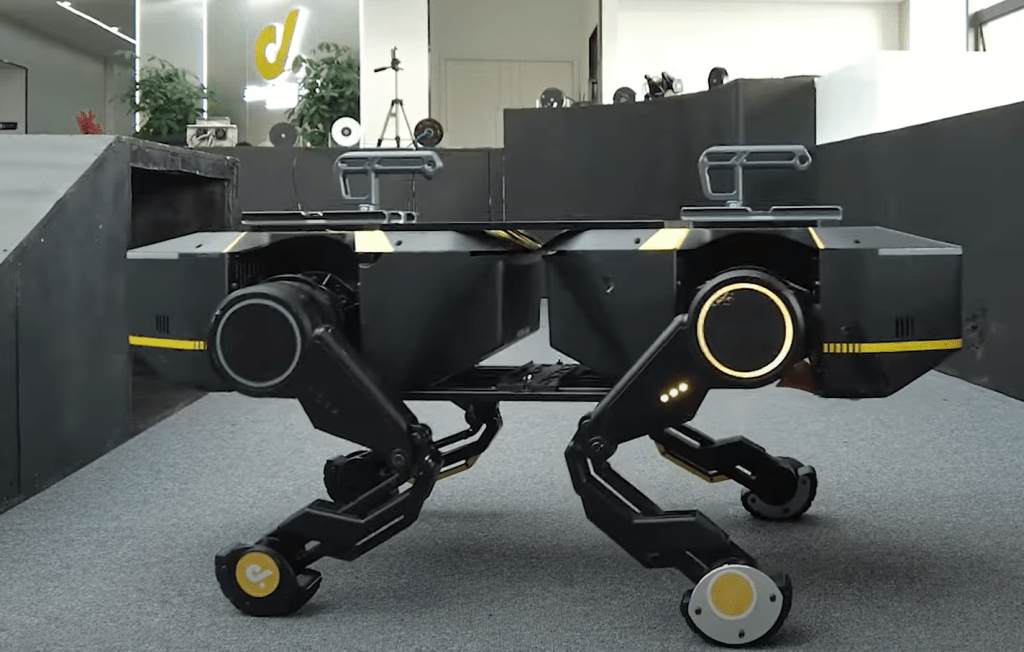
本末科技的TITA轮足机器人通过一项名为"直驱关节"的创新技术实现了重大突破:它直接取消了传统机器人必需的减速器齿轮组,让电机直接驱动关节运动。这种设计不仅让机器人动作更轻快,还使关节的力气(扭矩密度)比传统方案提升了1.5倍。机器人全身拥有8个可灵活转动的关节,既能像轮式小车一样在平地上快速滑行,又能像动物一样抬腿跨越障碍、攀爬30°陡坡甚至上下楼梯。TITA还搭载了摄像头、超声波等传感器,配合智能导航算法,能在矿山、工地等崎岖地形中精准定位,遇到障碍物会自动规划避让路线。顶部预留了通用导轨接口,可快速安装机械臂搬运重物或全景摄像头监控环境;两台TITA还能通过磁性连接瞬间组合成四足形态,轻松应对搬运任务。
本末科技的TITA轮足机器人凭借直驱关节技术实现了革命性突破。




发表回复