
EVERYBOT
清洁机器人
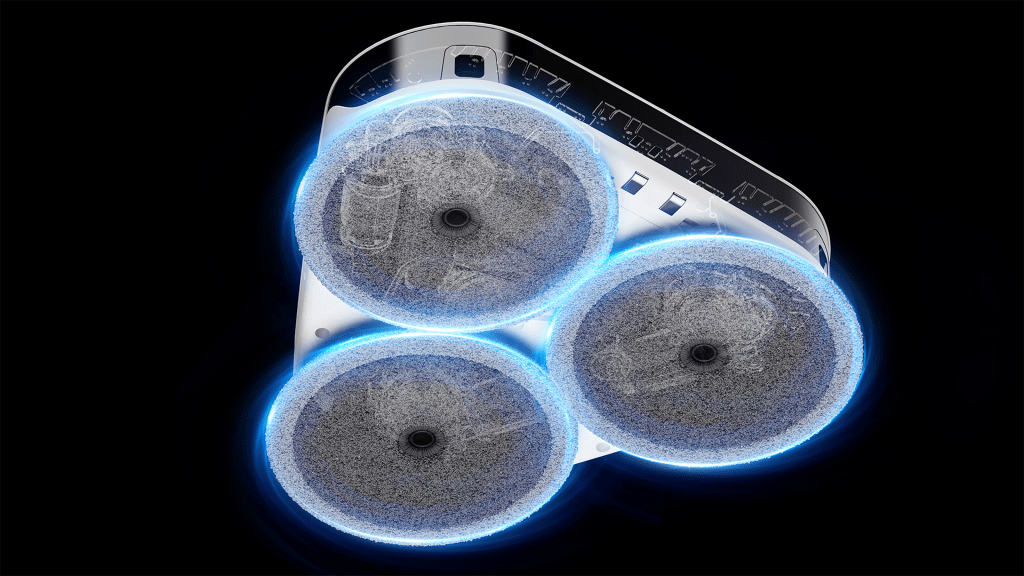
该产品由EVERYBOT INC.设计团队开发,以“去轮化结构”作为核心设计理念,通过三盘旋转拖布系统同时实现驱动与清洁功能,重构传统清洁机器人运动逻辑。外观采用低矮扁平的几何体量与简洁边界处理,强化产品在空间中的通过性与隐蔽性。结构上通过超薄机身与贴地设计提升清洁覆盖率,使其能够深入家具底部区域。CMF方面采用克制的中性配色与一体化外壳语言,突出功能导向与耐用属性。整体设计强调“效率优先”的工程逻辑,将结构创新直接转化为性能表达,体现出以功能驱动形式生成的工业设计路径。
它采用无轮结构,通过三组旋转拖布实现移动与清洁一体化,并以超薄机身强化家具底部清洁能力,是一款专注“拖地效率”的清洁机器人





发表回复